

MCP2515 CAN Bus Module (TJA1050) – Reliable CAN Communication for Embedded Projects
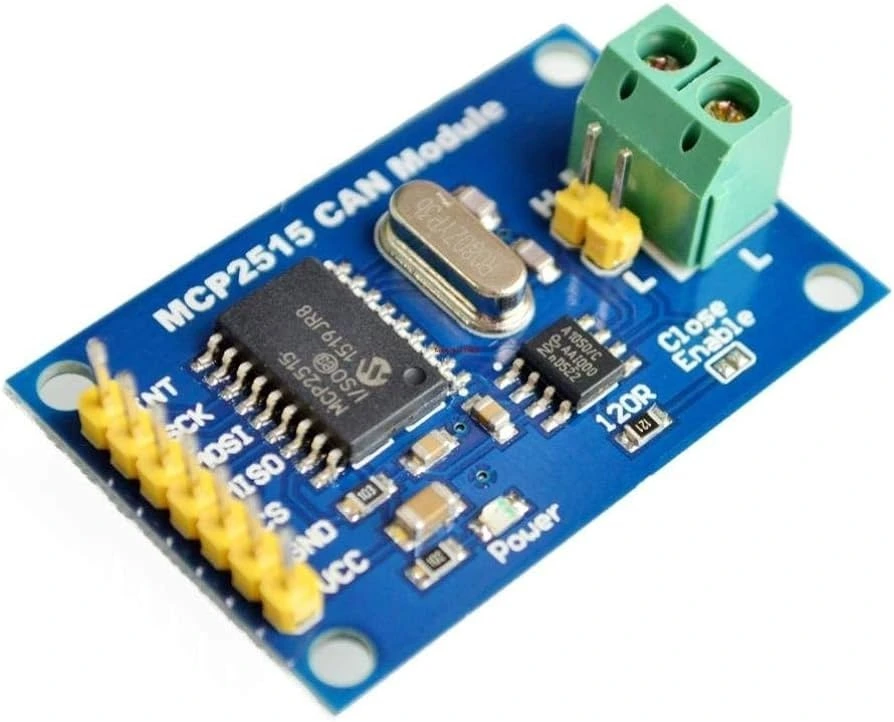
The MCP2515 CAN Bus Module with integrated TJA1050 transceiver provides a complete CAN controller and physical layer interface to add robust Controller Area Network communication to your projects. Ideal for automotive diagnostics, industrial automation, robotics and embedded systems, this module offers stable data exchange, strong noise immunity and a standardized SPI interface for fast integration.
Key Features
- MCP2515 CAN protocol controller with SPI interface
- TJA1050 CAN transceiver for physical layer (CAN_H, CAN_L)
- Compatible with Arduino, Raspberry Pi, STM32 and other microcontrollers
- Standard DB9-compatible CAN output plus screw terminal and header pins
- Adjustable baud rate up to 1Mb/s
- Power and Tx/Rx LEDs for communication status
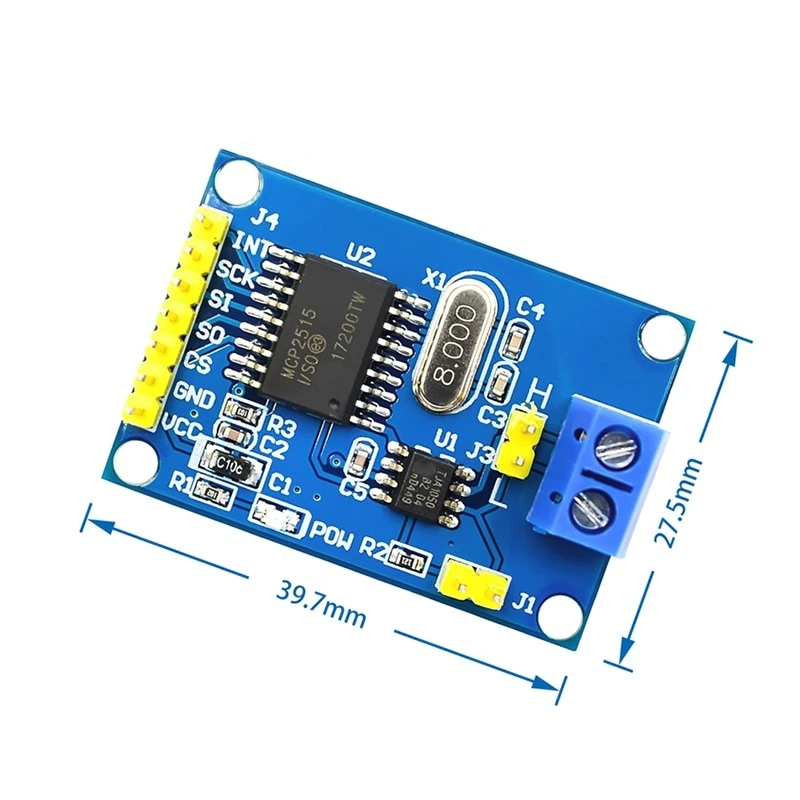
- Compact PCB (approx. 40mm x 28mm) for easy mounting in enclosures
Compatibility and Supported Platforms
This MCP2515 CAN Bus Module works with a wide range of development boards and microcontrollers. It is supported by popular open-source MCP2515 libraries and community examples to accelerate development.
- Arduino (Uno, Mega, Nano and compatible boards)
- Raspberry Pi (via SPI interface and compatible drivers)
- STM32 and other ARM Cortex microcontrollers
- Custom embedded controllers with SPI and 5V logic
Specifications
- Chipset: MCP2515 controller + TJA1050 transceiver
- Interface: SPI (via 8-pin header)
- Baud Rate: Up to 1Mb/s
- Operating Voltage: 5V
- Transceiver Output: CAN_H and CAN_L
- Dimensions: Approx. 40mm x 28mm
- Indicators: Power, Tx and Rx LEDs
- Connector Type: Screw terminal and header pins; DB9-compatible output
Wiring and Quick Setup
Getting started with the MCP2515 module is straightforward. Follow these general steps to connect the module to a microcontroller:
- Power: Connect 5V and GND to the module power pins.
- SPI signals: Connect SCK, MOSI, MISO and CS (chip select) to your microcontroller SPI pins.
- Interrupt: Connect the INT pin to a digital input if you want interrupt-driven message handling.
- CAN bus: Connect CAN_H and CAN_L to the CAN network via the screw terminal or DB9 connector. Use proper termination resistors (120 ohm) at each end of the bus.
- Install a compatible MCP2515 library and example sketches or scripts for your platform, then test with a second CAN node or a CAN analyzer.
Software and Libraries
The module is supported by multiple open-source libraries for Arduino and Linux platforms. These libraries provide functions to initialize the controller, set baud rates, send and receive frames, and handle interrupts. Example code and wiring diagrams are widely available in community repositories and documentation.
Common Applications
- Automotive diagnostics and CAN monitoring tools
- Vehicle communication and control modules
- Industrial automation networks and machine controllers
- Robotics systems requiring reliable multi-node communication
- Research and development labs for CAN protocol testing
Why Buy from Colgroad
Colgroad delivers tested, quality electronics to engineers, educators and hobbyists across Pakistan. Buying from Colgroad ensures fast local delivery, responsive support and access to tested modules ready for development and deployment.
Order Now
Enhance your project’s communication capabilities with the MCP2515 CAN Bus Module. Order now to get a compact, reliable CAN interface with wide community support and quick setup resources.
Note: Images are for illustration purposes only.













Reviews
There are no reviews yet