
Overview
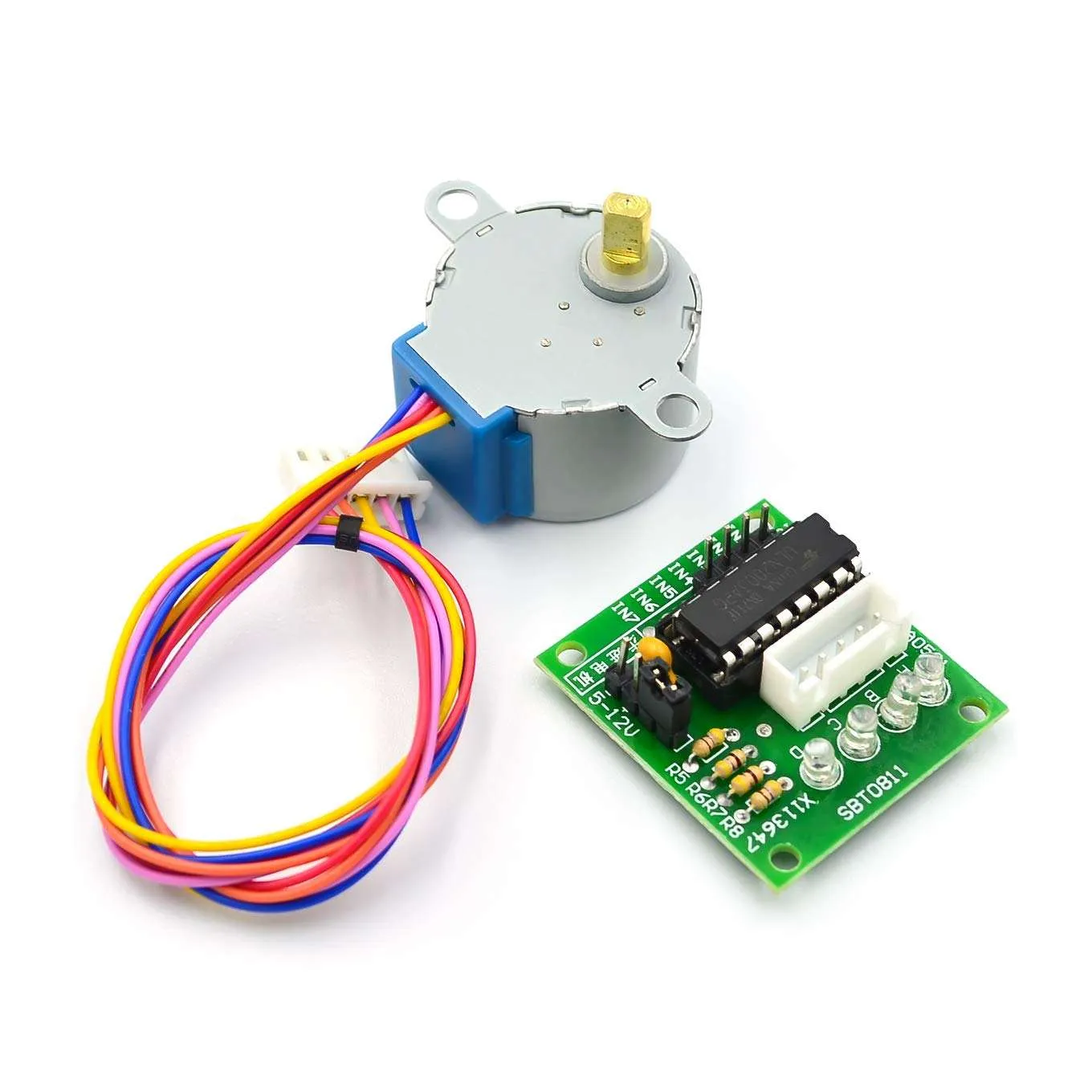
The 28BYJ-48 5V stepper motor paired with the ULN2003 driver module is a popular, low-cost motion control solution for hobbyists, makers, and engineers. This unipolar 5V stepper provides precise, repeatable motion with a compact footprint and easy interfacing to microcontrollers such as Arduino and Raspberry Pi.
Key Advantages
- Accurate position control with small step angles for repeatable motion
- Easy integration using the included ULN2003 driver board and 5-pin connector
- Indicator LEDs on the driver board for visual coil activation feedback
- Low-voltage 5V operation suitable for most development boards and battery-powered projects
Features
Motor Features
- Type: Unipolar 5V DC stepper motor (28BYJ-48)
- Configuration: Four-phase, 5-wire design
- Step angle: 5.625° per step with internal 1/64 reduction ratio for finer motion
- Rated torque: 34.3 mN·m
- Shaft: Single flat shaft for secure mounting
Driver Module Features (ULN2003)
- Driver IC: ULN2003A Darlington transistor array for safe coil switching
- Input voltage: 5V DC compatible with common microcontrollers
- Control pins: IN1 to IN4 for motor coil activation
- Indicators: 4 LEDs, one per motor phase for troubleshooting and status
- Motor connector: Screw terminal output for robust wiring
Specifications
Stepper Motor (28BYJ-48)
- Type: Unipolar 5V DC stepper motor
- Voltage: 5V DC
- Step Angle: 5.625° per step (with 1/64 internal reduction)
- Reduction Ratio: 1/64
- Number of Phases: 4
- Rated Torque: 34.3 mN·m
- Shaft Type: Single flat shaft
- Connector: 5-pin JST / screw terminal via ULN2003 board
Driver Module (ULN2003)
- Input Voltage: 5V DC
- IC: ULN2003A Darlington transistor array
- Indicators: 4 LEDs (one per motor phase)
- Interface: IN1 to IN4 control pins
- Output Type: Terminal block for motor connection
Compatibility and Wiring
The module is plug-and-play with Arduino, Raspberry Pi, and most microcontrollers. Connect the motor 5-pin connector to the ULN2003 board, wire the module VCC to 5V and GND to ground, then use IN1-IN4 to control coils from your microcontroller’s GPIO pins. Use a separate 5V supply for higher current needs to avoid resetting the controller.
Driving Modes and Control
- Full-step: Maximum torque, simpler control sequence.
- Half-step: Better resolution and smoother motion, common for precise position control.
- Microstepping: Not supported natively by ULN2003; for finer microstepping consider a dedicated microstepping driver.
Applications
- Robotics and automation systems
- Camera pan and tilt platforms
- Small CNC machines and 3D printer mechanisms
- Smart curtain or door position control
- DIY motion control and educational projects
- Learning stepper motor programming with Arduino or Raspberry Pi
Package Contents
- 1 x 28BYJ-48 5V stepper motor (4-phase, 5-wire)
- 1 x ULN2003 driver module with indicator LEDs
- 1 x 5-pin connector cable (if provided by vendor)
Tips and Best Practices
- Use a stable 5V supply rated for the motor current to avoid undervoltage issues.
- Add a flyback diode or rely on the ULN2003 internal suppression for inductive spikes.
- Start with half-step mode for smoother movement; increase speed gradually to avoid missed steps.
- Secure the flat shaft with a matching set-screw pulley or adapter to prevent slippage.
Note
Images are for illustration purposes only. Verify connector type and included accessories with the vendor before ordering.













Reviews
There are no reviews yet